CUDA核函数详解(一)
笔者在本科阶段实现了一个Edge-Compute-Engine,但是实现的比较粗糙和简单,计划通过cuda进行矩阵方向的重构和加速,顺便记录一些内容。
在 GPU 编程中,CUDA(Compute Unified Device Architecture)使得并行计算得以高效实现。在 CUDA 中,矩阵加法是第一个入门操作,因其简单且能展示 CUDA 中线程并行化的核心概念。本文将从最底层的原理开始,实现矩阵加法的 CUDA 核函数,并深入讨论其实现背后的一些信息。
1. 什么是矩阵加法?
矩阵加法是线性代数中的一种基本运算,定义为两个矩阵对应元素的逐一相加。对于给定的矩阵 A 和 B,矩阵 C 的每个元素
由
给出。
我们要做的,就是把这个运算搬到 GPU 上,并利用并行计算的优势加速这个操作。
2. (必知必会)CUDA 基础
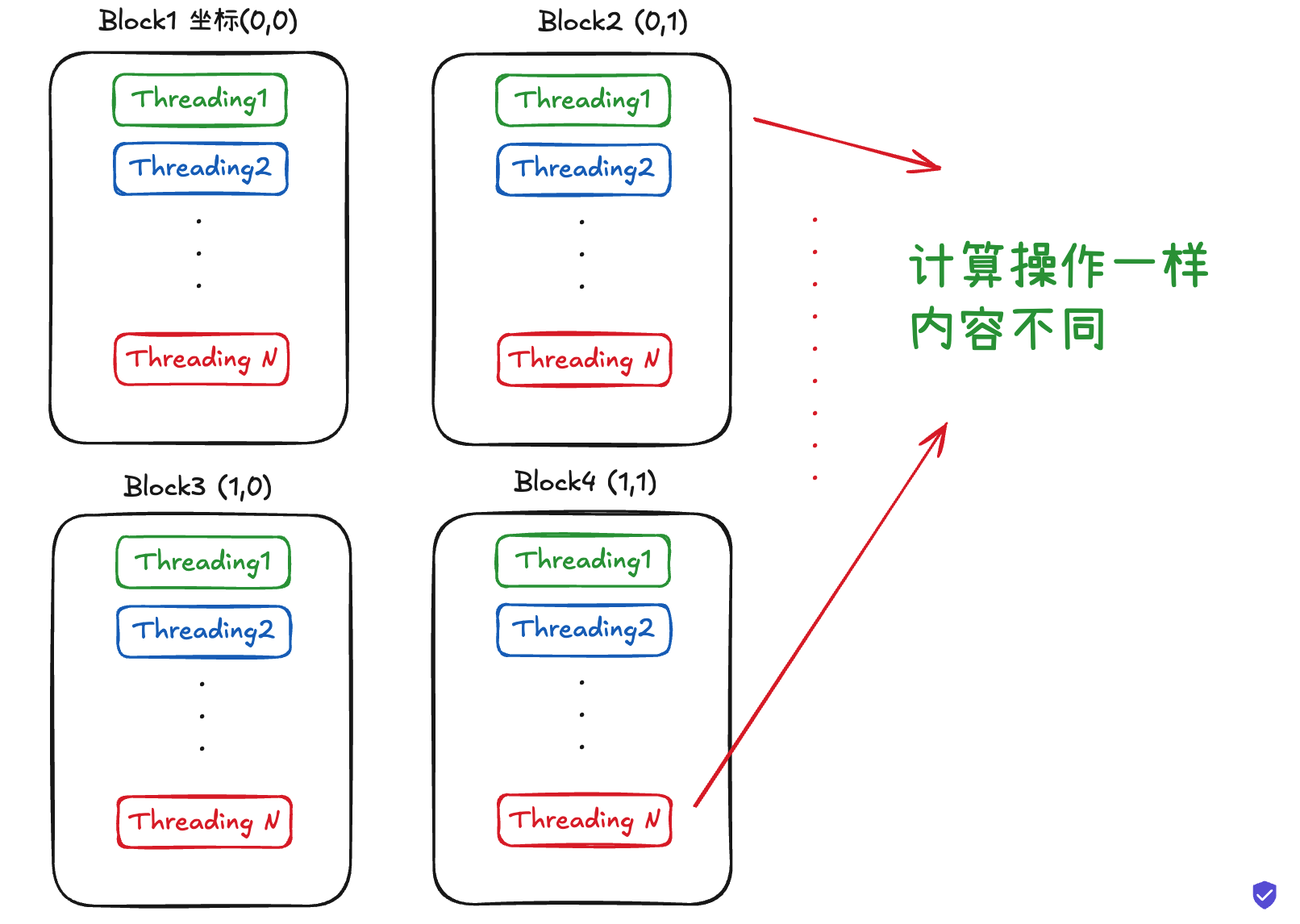
在 CUDA 中,计算任务被分配给大量并行线程来完成。每个线程都执行同样的操作,但作用于不同的数据片段。为了实现这一目标,CUDA 使用 网格(grid) 和 块(block) 的结构。
• 线程块(Block):是一个线程的集合,所有线程在同一个块内可以共享内存。
• 网格(Grid):由多个线程块组成。
每个线程在自己的计算中有一个唯一的 ID,这些 ID 用于标识它在线程块和网格中的位置。
简单画了一个图:
3. CUDA 核函数解析
接下来,我们来看一个实现矩阵加法的 CUDA 核函数:
xxxxxxxxxx__global__ void matrixAddKernel(const float* A, const float* B, float* C, int rows, int cols) { int idx = blockIdx.x * blockDim.x + threadIdx.x; int idy = blockIdx.y * blockDim.y + threadIdx.y; if (idx < rows && idy < cols) { int linear_idx = idx * cols + idy; C[linear_idx] = A[linear_idx] + B[linear_idx]; }}3.1 输入参数
• A 和 B:矩阵 A 和矩阵 B 的指针,它们存储在 GPU 上的全局内存中。
• C:矩阵 C 是最终结果矩阵,也会存储在 GPU 上的全局内存中。
• rows 和 cols:矩阵的行数和列数。
3.2 核心逻辑
让我们逐步解析每一行代码的实现细节:
3.2.1 计算线程的索引
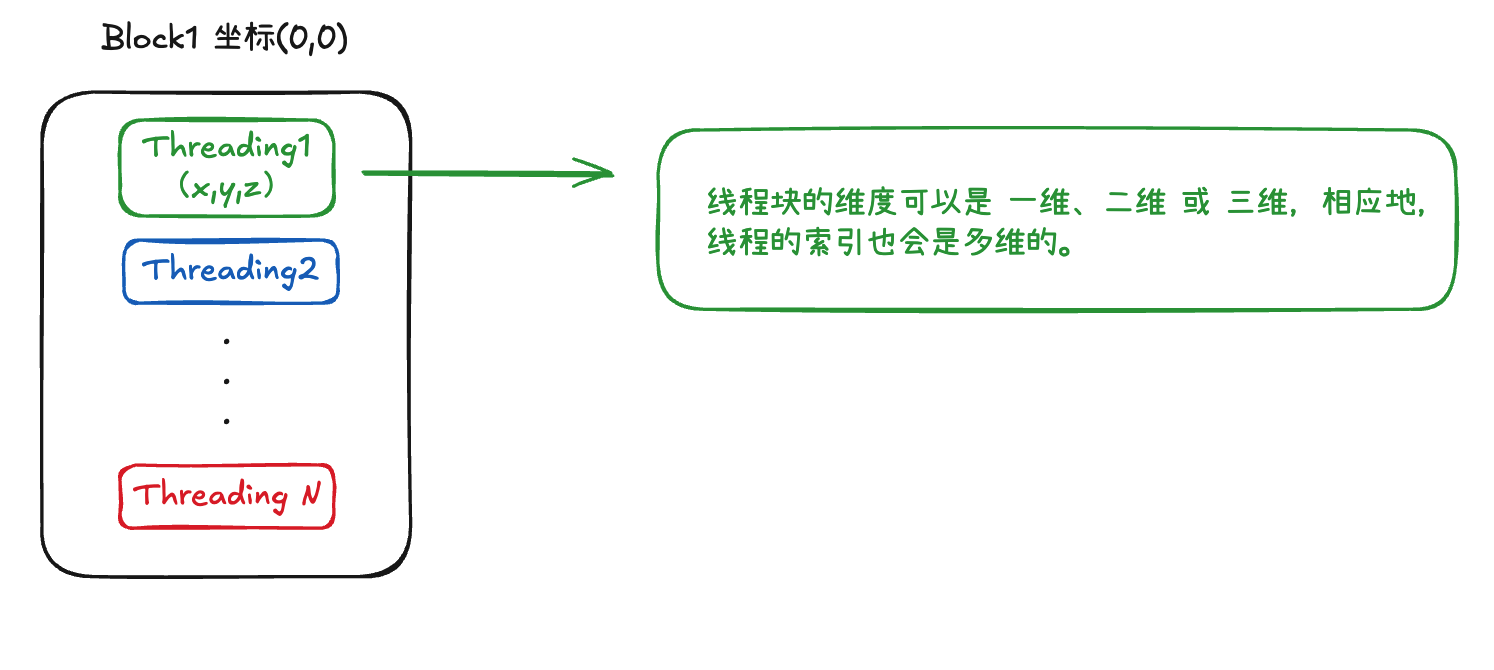
上图为例:
块内线程可以有xyz三维坐标:
 在我们的例子里面:
在我们的例子里面:
xxxxxxxxxxint idx = blockIdx.x * blockDim.x + threadIdx.x;int idy = blockIdx.y * blockDim.y + threadIdx.y;• blockIdx.x 和 blockIdx.y 分别表示线程块在 x 和 y 方向上的索引。
• blockDim.x 和 blockDim.y 表示每个线程块在 x 和 y 方向上包含的线程数。
• threadIdx.x 和 threadIdx.y 分别表示线程在其所属块内的 x 和 y 方向上的索引。
通过这几个值的组合,我们能够计算出当前线程在矩阵中的横向索引 idx 和纵向索引 idy。
3.2.2 边界检查
xxxxxxxxxxif (idx < rows && idy < cols) {CUDA 中的线程会按照网格结构启动,某些线程可能会对应矩阵外部的无效位置,因此在执行矩阵加法之前,我们需要检查当前线程的索引是否在矩阵的有效范围内。如果超出范围,线程将不执行任何操作,从而避免越界访问。
3.2.3 计算线性索引
xxxxxxxxxxint linear_idx = idx * cols + idy;由于矩阵在内存中通常是以行主序(row-major order)存储的,因此我们需要将二维的 idx 和 idy 转换为线性的一维索引 linear_idx。这个转换的公式是:
这样,我们可以通过 linear_idx 直接访问矩阵中的元素。
3.2.4 执行加法操作
xxxxxxxxxxC[linear_idx] = A[linear_idx] + B[linear_idx];这里,我们将矩阵 A 和 B 对应位置的元素相加,结果存储到矩阵 C 的对应位置。这一操作是并行执行的,每个线程负责处理一个元素的加法。
linear_idx = idx * cols + idy: 这是将二维的 (idx, idy) 坐标转换为 一维索引。在矩阵的存储方式中,通常是 按行主序(Row-major order) 存储的,因此,二维坐标可以转换为线性索引(展平操作)。这样,每个线程就能计算出它应该处理的矩阵位置。
• 矩阵加法: C[linear_idx] = A[linear_idx] + B[linear_idx] 这个操作就是每个线程执行的任务,直接将 A 和 B 对应位置的元素相加,并存入 C 的对应位置。
而后就直接并行化,无需显式循环。
3.3 测试
3.3.1 第一步:定义Matrix
xxxxxxxxxxstruct Matrix_CU { int row; int col; float* data;
Matrix_CU(int r, int c) : row(r), col(c) { data = new float[r * c](); }
Matrix_CU(const Matrix_CU& other) : row(other.row), col(other.col) { data = new float[row * col]; std::memcpy(data, other.data, row * col * sizeof(float)); }
Matrix_CU& operator=(const Matrix_CU& other) { if (this != &other) { delete[] data; row = other.row; col = other.col; data = new float[row * col]; std::memcpy(data, other.data, row * col * sizeof(float)); } return *this; } ~Matrix_CU() { delete[] data; }
void randomInit() { for (int i = 0; i < row * col; ++i) { data[i] = static_cast<float>(rand()) / RAND_MAX; } }
void printFirstElement() const { std::cout << "First element: " << data[0] << std::endl; } void printSubMatrix(int numRows, int numCols) const { for (int i = 0; i < numRows; ++i) { for (int j = 0; j < numCols; ++j) { std::cout << data[i * col + j] << " "; } std::cout << std::endl; } } };这里的定义来自我自己实现的https://github.com/AllenZYJ/Edge-Computing-Engine#:
• row 和 col 分别表示矩阵的行数和列数。
• data 是一个指向 float 类型的指针,用来存储矩阵的数据。矩阵的数据是按行主序(row-major order)存储的,即矩阵的每一行按顺序存储在内存中。
这里的构造函数接受行数 r 和列数 c 作为参数,并通过 new 关键字在堆上分配一个大小为 r * c 的 float 数组来存储矩阵的数据。括号 () 表示将数据初始化为 0。
接下来是拷贝构造函数:
xxxxxxxxxxMatrix_CU(const Matrix_CU& other) : row(other.row), col(other.col) { data = new float[row * col]; // 分配新的内存 std::memcpy(data, other.data, row * col * sizeof(float)); // 复制数据}拷贝赋值函数:
xxxxxxxxxxMatrix_CU& operator=(const Matrix_CU& other) { if (this != &other) { // 防止自赋值 delete[] data; // 释放当前对象的内存 row = other.row; col = other.col; data = new float[row * col]; // 重新分配内存 std::memcpy(data, other.data, row * col * sizeof(float)); // 复制数据 } return *this;}它们负责对象的复制过程。它们的主要作用是在对象的创建和赋值时,确保正确的内存管理,避免潜在的错误和资源泄漏。
在大规模计算,尤其是涉及大量数据和高效内存管理的计算任务中,如果没有显式定义拷贝构造函数和拷贝赋值运算符,C++ 会使用默认的拷贝构造函数和赋值运算符,通常会进行浅拷贝(shallow copy)。浅拷贝只会复制对象的成员变量(例如指针),而不会复制指针指向的内存区域。这意味着两个对象会共享同一块内存。
3.3.2 实现核函数调用
matrixAddCUDA 函数的作用是使用 CUDA 进行矩阵加法计算。它接受三个 Matrix_CU 类型的参数:A、B 和 C,分别表示输入的两个矩阵和输出的矩阵。具体步骤如下:
xxxxxxxxxxvoid matrixAddCUDA(const Matrix_CU& A, const Matrix_CU& B, Matrix_CU& C) { assert(A.row == B.row && A.col == B.col); assert(A.row == C.row && A.col == C.col); const int rows = A.row; const int cols = A.col; size_t size = rows * cols * sizeof(float); float *d_A, *d_B, *d_C;
CHECK_CUDA_ERROR(cudaMalloc(&d_A, size)); CHECK_CUDA_ERROR(cudaMalloc(&d_B, size)); CHECK_CUDA_ERROR(cudaMalloc(&d_C, size));
CHECK_CUDA_ERROR(cudaMemcpy(d_A, A.data, size, cudaMemcpyHostToDevice)); CHECK_CUDA_ERROR(cudaMemcpy(d_B, B.data, size, cudaMemcpyHostToDevice));
dim3 blockSize(16, 16); // 256 threads per block dim3 gridSize((cols + blockSize.x - 1) / blockSize.x, (rows + blockSize.y - 1) / blockSize.y); auto start = std::chrono::high_resolution_clock::now();
matrixAddKernel<<<gridSize, blockSize>>>(d_A, d_B, d_C, rows, cols); auto end = std::chrono::high_resolution_clock::now(); std::chrono::duration<double> elapsed = end - start; std::cout << "GPU执行时间: " << elapsed.count() * 1000 << " ms\n"; CHECK_CUDA_ERROR(cudaGetLastError());
CHECK_CUDA_ERROR(cudaMemcpy(C.data, d_C, size, cudaMemcpyDeviceToHost));
CHECK_CUDA_ERROR(cudaFree(d_A)); CHECK_CUDA_ERROR(cudaFree(d_B)); CHECK_CUDA_ERROR(cudaFree(d_C));}
接下来,调用这个函数
xxxxxxxxxxconst int rows = 10240;const int cols = 10240; Matrix_CU A(rows, cols);Matrix_CU B(rows, cols);Matrix_CU C_gpu(rows, cols); // GPU结果矩阵matrixAddCUDA(A, B, C_gpu);编译执行:
xxxxxxxxxxnvcc -arch=sm_80 -I/usr/local/cuda/include -L/usr/local/cuda/lib64 cuda_mat/matrix_cudadef.cu -o conv_test && ./conv_test结果:
xxxxxxxxxx使用GPU: NVIDIA GeForce RTX 4090测试矩阵大小: 10240x10240矩阵A: First element: 0.840188矩阵B: First element: 0.301959CPU版本:CPU执行时间: 419.75 msCPU结果: First element: 1.14215(第一个元素求和结果)GPU版本:GPU执行时间: 0.137581 msGPU结果: First element: 1.14215(第一个元素求和结果)标准差:0.612201最大值: 1.99991最小值: 0.000145095平均值: 0.32和: 3.35544e+07标准差: 0.612201